
RaspberryPiとTWELiteで作る戸締り確認装置の製作記録
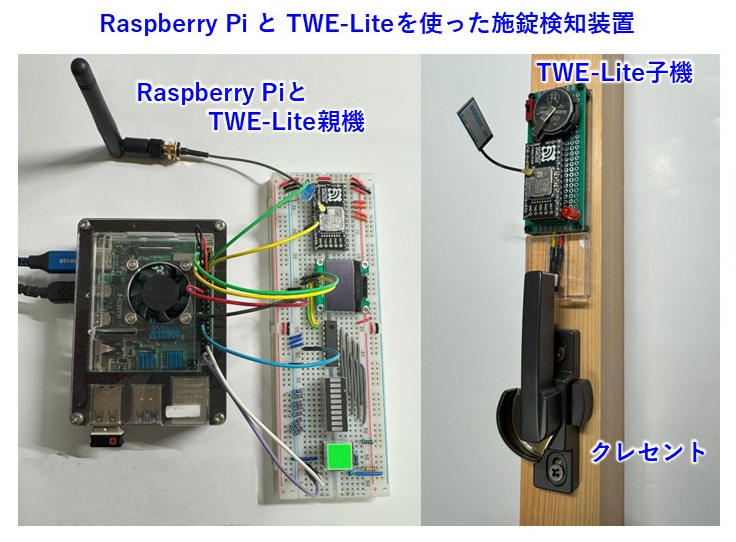
防犯のため、窓や玄関ドアが開かれた時に警報を出す防犯システムは各種あり、セキュリティ会社に取り付けてもらったり、DIYで簡単に取り付けすることもできる。その中でも、Panasonic製のワイヤレスセキュリティシステム「マモリエ(Panasonicの商標)」は、窓のクレセントの開閉を検知する機能を持ち、戸締りの確認を容易にできる防犯システムだ。しかし、この「マモリエ」は2020年3月で生産中止となってしまったので、それに代わる装置をRaspberry Piと超小型無線データ通信モジュールTWE-Liteを使って試作した。
RaspberryPiで作る電波時計への時刻データ送信機の製作記録
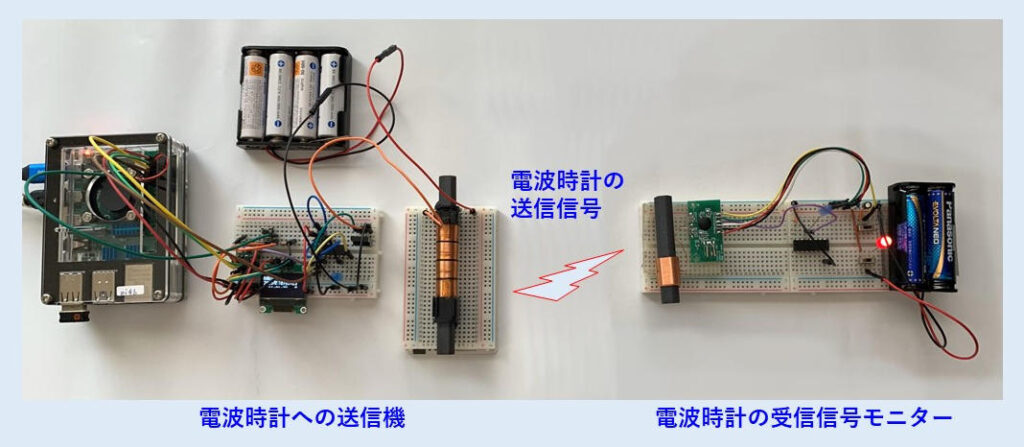
電波時計が東西の送信所からの送信電波(40kHz/60kHz)を受信できない場合への対応として、RaspberryPiを用いてNTP時刻データを電波時計に送信できる「電波時計への時刻データ送信機」を製作してみた。また、送信データが正しく受信できるかどうかをモニターするための電波時計受信信号モニターも製作した。
尚、今回製作した送信機は電波法に違反しない微弱電波なので、この送信機からある程度離れた電波時計は受信できません。もし、この記事を参考にして製作される場合には、それぞれの責任で電波法に違反しないように注意して下さい。電波時計受信信号モニターを使えば、どこまで信号が届いているか確認できます。
画像認識した白線に沿って自走するラズマウスの製作記録
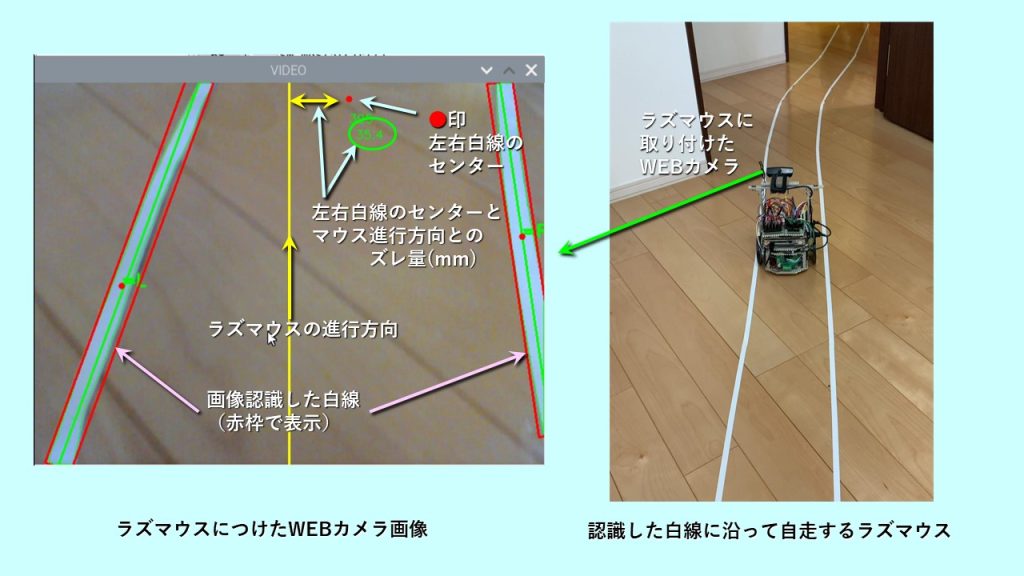
ラズマウスに取り付けたカメラ画像を、OpenCVを使って白線を認識して、左右白線の中央線に沿って自走するラズマウス5号機の製作記録。
左右白線のセンターとラズマウスの進行方向のズレ量を最小にするようにPID制御して自走する。
離散事象シミュレーションのアニメーション化
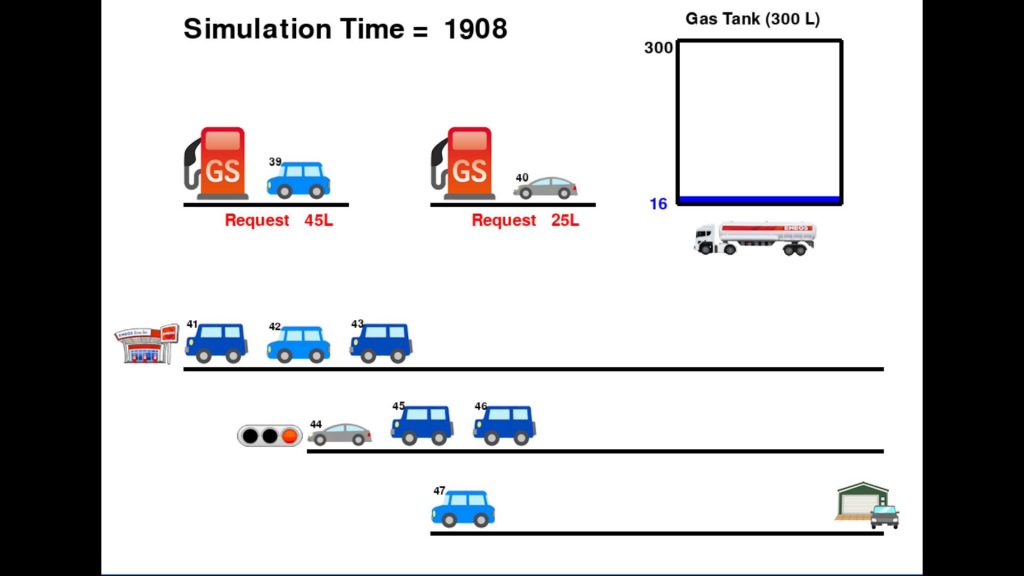
待ち行列モデルの離散事象シミュレーションを行うイベント駆動型プログラミングSimPyを使って、シミュレーション結果を評価することができる。しかし、その途中過程を視覚で確認することができないが、今回、このSimPyのReal-time simulationsを使い、イベント発生に従って事象が変化するアニメーション動画を作成したので、その手順を記録に残すことにした。アニメーション動画はpygameを使った。尚、このプログラムはRaspberry PiでなくてもWindows PCでも動作するが、将来、ラズパイのGPIOと組み合わせると更に興味深いプログラムを作ることができると考えている。
文字標識を認識して動作するラズマウス4号機の製作記録
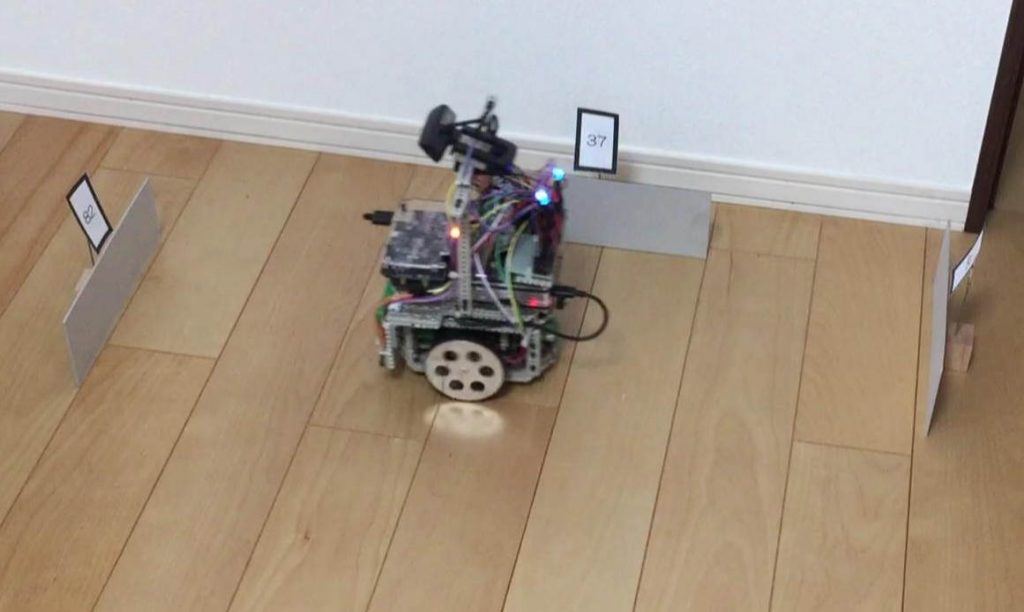
ラズマウスに取り付けたカメラで標識に書かれた数字を認識して、その数字が意味する動作(左折、右折、前進、後退、停止)を実行するラズマウス4号機の製作記録。
ラズパイの標準フォントの数字を学習させ、ラベルに印字した数字を認識するプログラムは、このサイトの「プログラム事例」の「ラズパイのフォントで学習する文字認識プログラム例」を使った。
Raspberry Pi で姿勢制御する飛ばさないドローンの試験記録
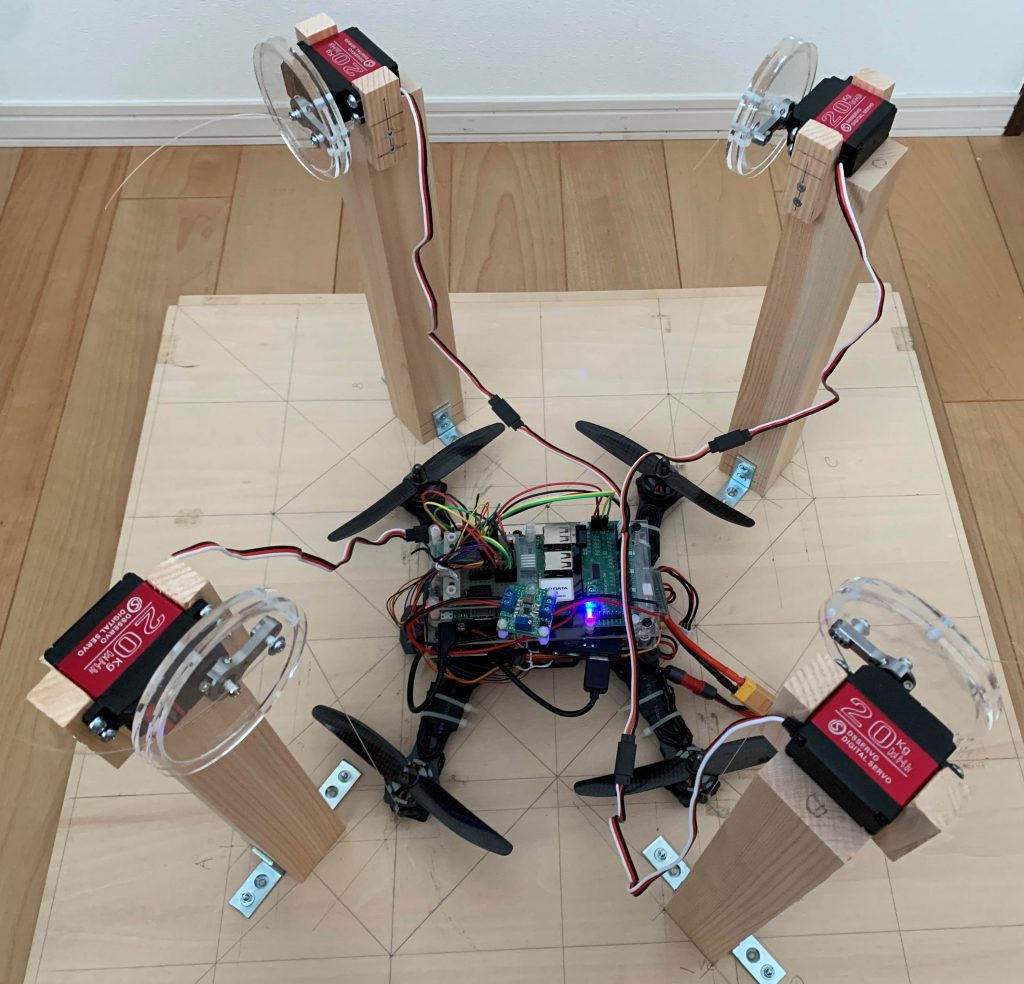
前回、Raspberry Piで姿勢制御するドローンを製作して検証試験を試みたが、20,000回転のプロペラの脅威に負けて、検証途中で中止。今回は、脅威となるプロペラを回さず、Raspberry Piによる姿勢制御の動作を検証し、その一連の記録をまとめたもの。
Raspberry Pi で制御するラズドローンの製作記録(2)
トイドローンTelloを楽しんで、ドローンキットRoboCat270を組立て、試験飛行することで、ドローンの仕組みを理解することができた。(RoboCat270の記録はここ)
ここに綴るのは、Raspberry Piで制御するドローン、ラズドローンを製作した記録。
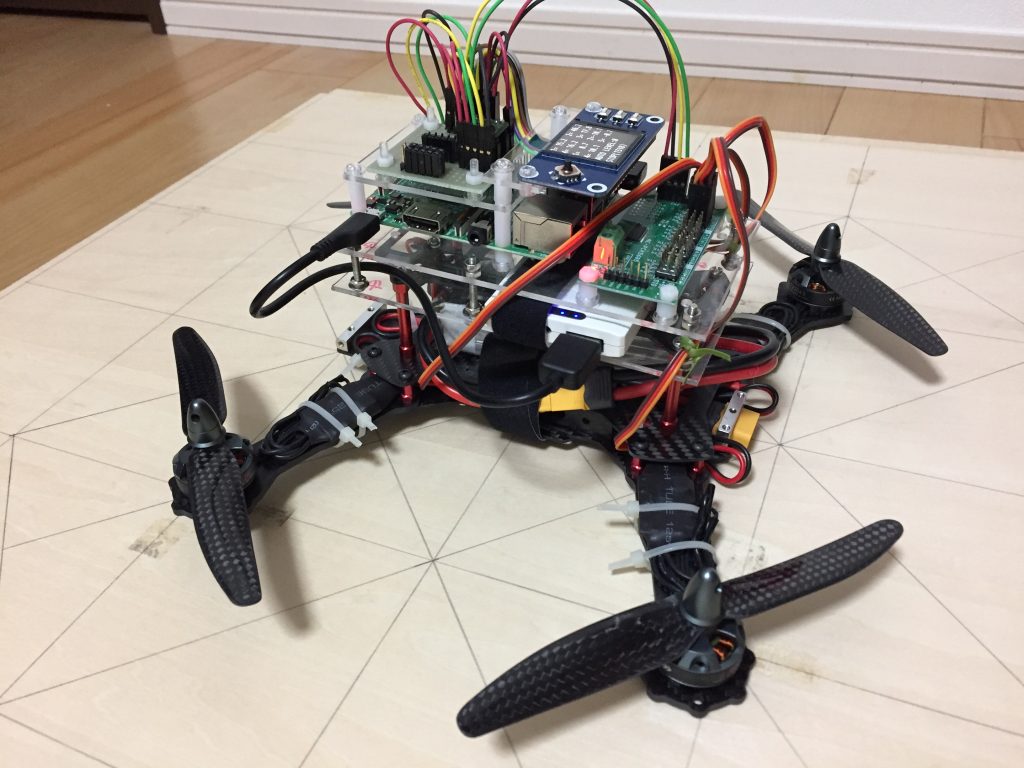
Raspberry Piで制御するラズドローンの製作記録(1)

トイドローンTelloを買って、室内で飛ばして楽しんでいたが、飛ばすだけではつまらない。ドローンの制御をRaspberry Piで出来ないだろうか?が製作の動機。
TelloにRaspberry Piを載せるには小さすぎる。Raspberry Piを積むことのできる、安価で改造ができるドローンを探した。ドローンキットではポピュラーなRoboCat270を買って、作って、飛ばして(実際は室内なので離陸だけして墜落)、仕組みを勉強。これから綴るのは、Raspberry Piで制御するドローン、ラズドローンを製作した記録。
Raspberry Piで走る迷路探索ラズマウス3号機の製作記録
公式マイクロマウス競技を見て、自走できること、迷路を探索できることをゴールに競技用マイクロマウスに近いラズマウスを製作することを試みた。用いる部品の制約から迷路幅は20cm(壁中心間)として、家の中で検証するため、試験用迷路は3区画×3区画とした。競技と同じように、迷路探索を行った後、スタートからゴールまで最短コースを走る仕様とした。ステッピングモーターを使用。
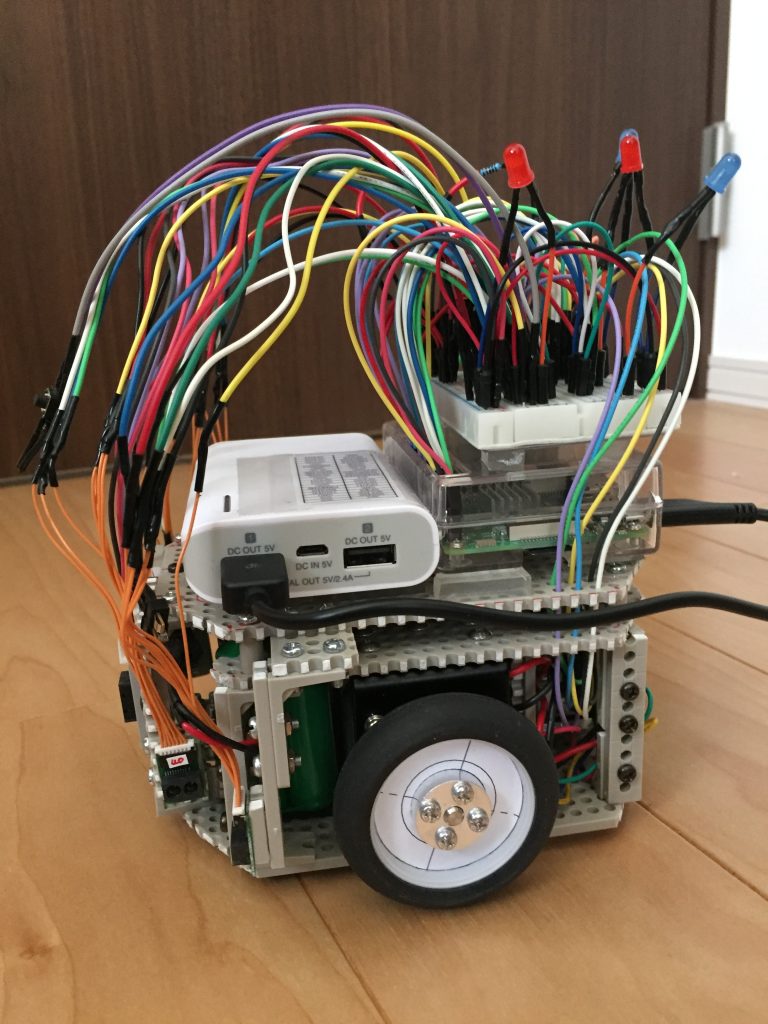
ラズマウス1号機を改造したラズマウス2号機
Raspberry Piを使った最初の作品、ラズマウス1号機と2号機を製作した時を思い出して、残っている資料を纏めた記録です。
自動・手動操作はiPadから行い、直進、回転、センサーによる自動停止ができる初号機を改良した2号機。
初めてのRaspberry Piで作るラズマウス1号機
3年前、書籍「最新Raspberry Piで学ぶ電子工作」(金丸隆志著)とRaspberry Pi 3Bを購入して、Raspberry Piのモノ作り、コト作りをスタートした。
Raspberry Piを使った最初の作品、ラズマウス1号機と2号機を製作した時を思い出して、残っている資料を纏めた記録です。