Raspberry Pi で制御するラズドローンの製作記録(1)
トイドローンTelloを買って、室内で飛ばして楽しんでいたが、飛ばすだけではつまらない。ドローンの制御をRaspberry Piで出来ないだろうか?が製作の動機。
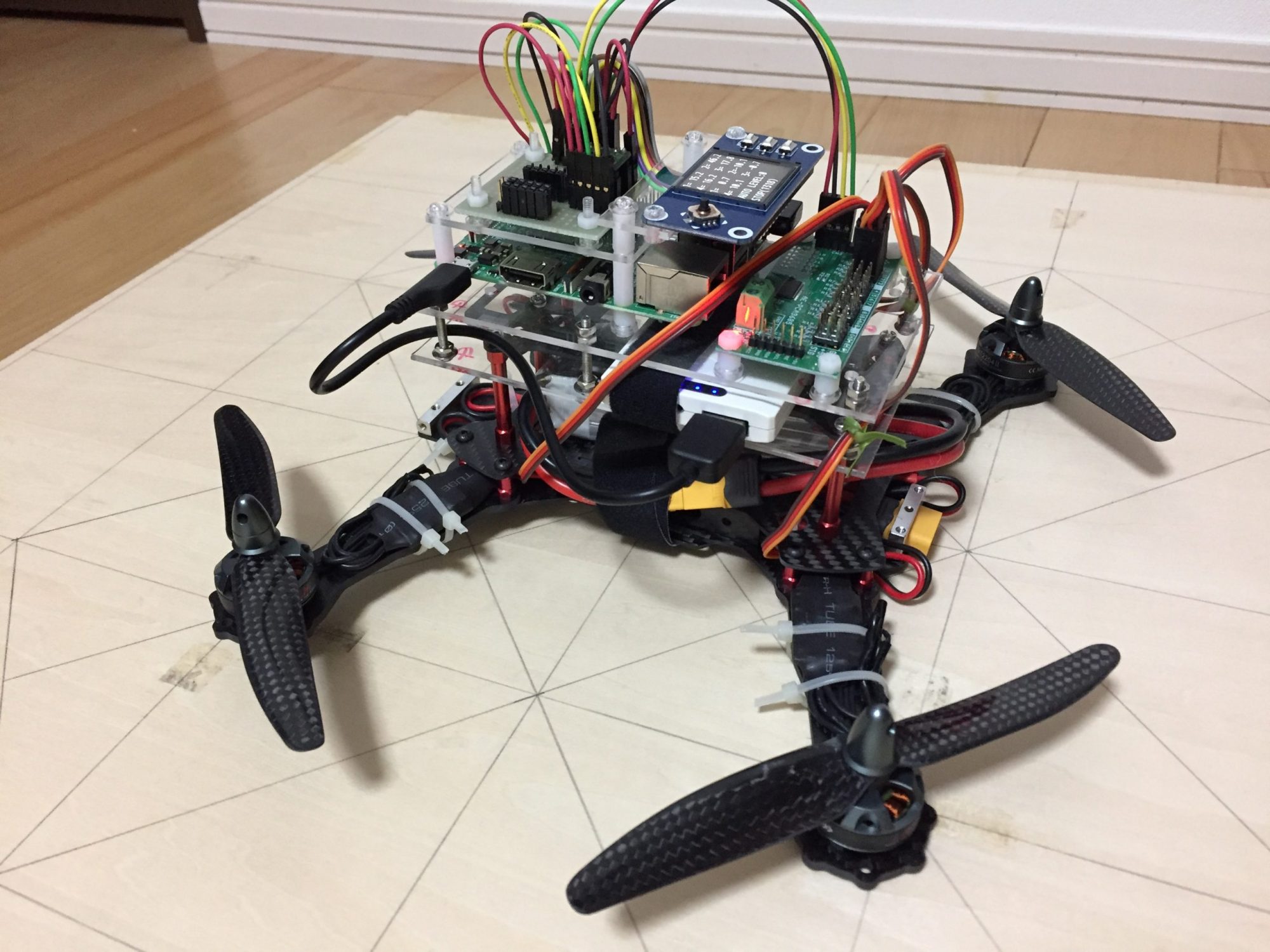
TelloにRaspberry Piを載せるには小さすぎる。Raspberry Piを積むことのできる、安価で改造ができるドローンを探した。ドローンキットではポピュラーなRoboCat270を買って、作って、飛ばして(実際は室内なので離陸だけして墜落)、仕組みを勉強。これから綴るのは、Raspberry Piで制御するドローン、ラズドローンを製作した記録。
●室内で飛ばせるトイドローンTelloとは

今では、世界の70%のシェアを誇るDJI社製のホビー用のトイドローンTello。バッテリーを充電して、iPhoneにアプリをダウンロードして、クリックすれば、簡単に飛ばせ、撮影までできる。重量が200gr以下なので、屋外でも許可なしで飛ばせるが、強風が吹くと、どこかへ行ってしまう危険性がある。これにRaspberry Piを積むには小さすぎるし、分解して部品だけ流用するのも難しい。
●まずはポピュラーなドローンキットRoboCat270の調査
・ドローンキットRoboCat270と必要部品の購入
RoboCat270キット(\12,633 : Amazon)
FlySky FS-i6 2.4G 6CH AFHDS プロポ 送信機
FS-iA6 Rx 受信機セット(\4,800 : Amazon)
HRB Li-Poバッテリー 11.1V 2200mAh 3S 30C (\2,999 : Amazon)
バッテリーチャージャー iMAX B6(\3,980 : Amazon)
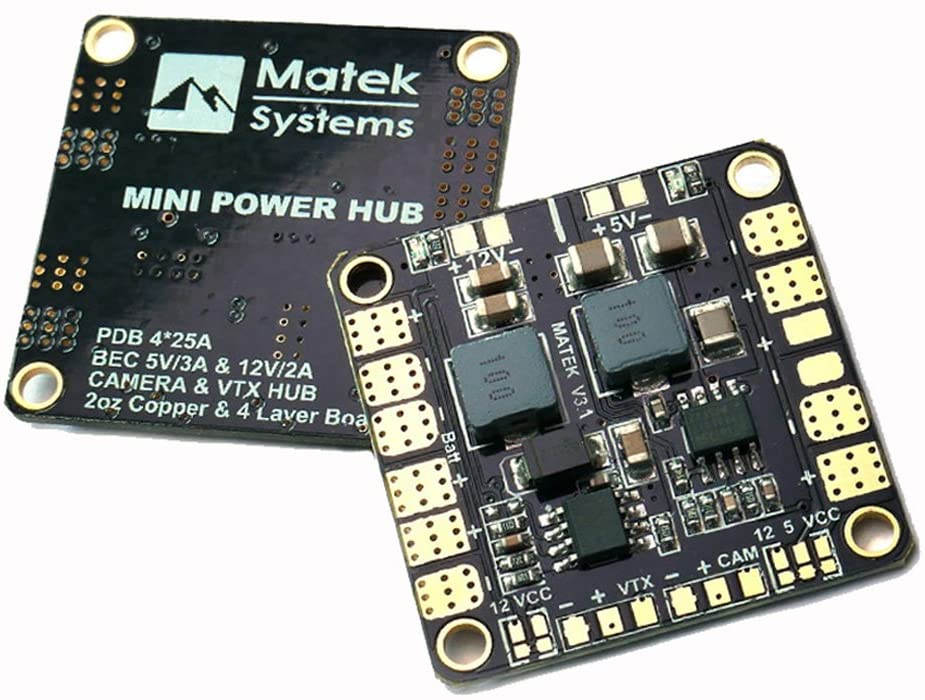
ドローン用 BEC(Battery Eliminator Circuitry)(\1,529 : Amazon)
※キット付属のBECが使えなかった

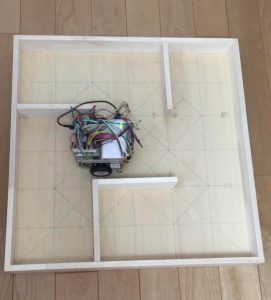
・ベースフレームとモーターの組立
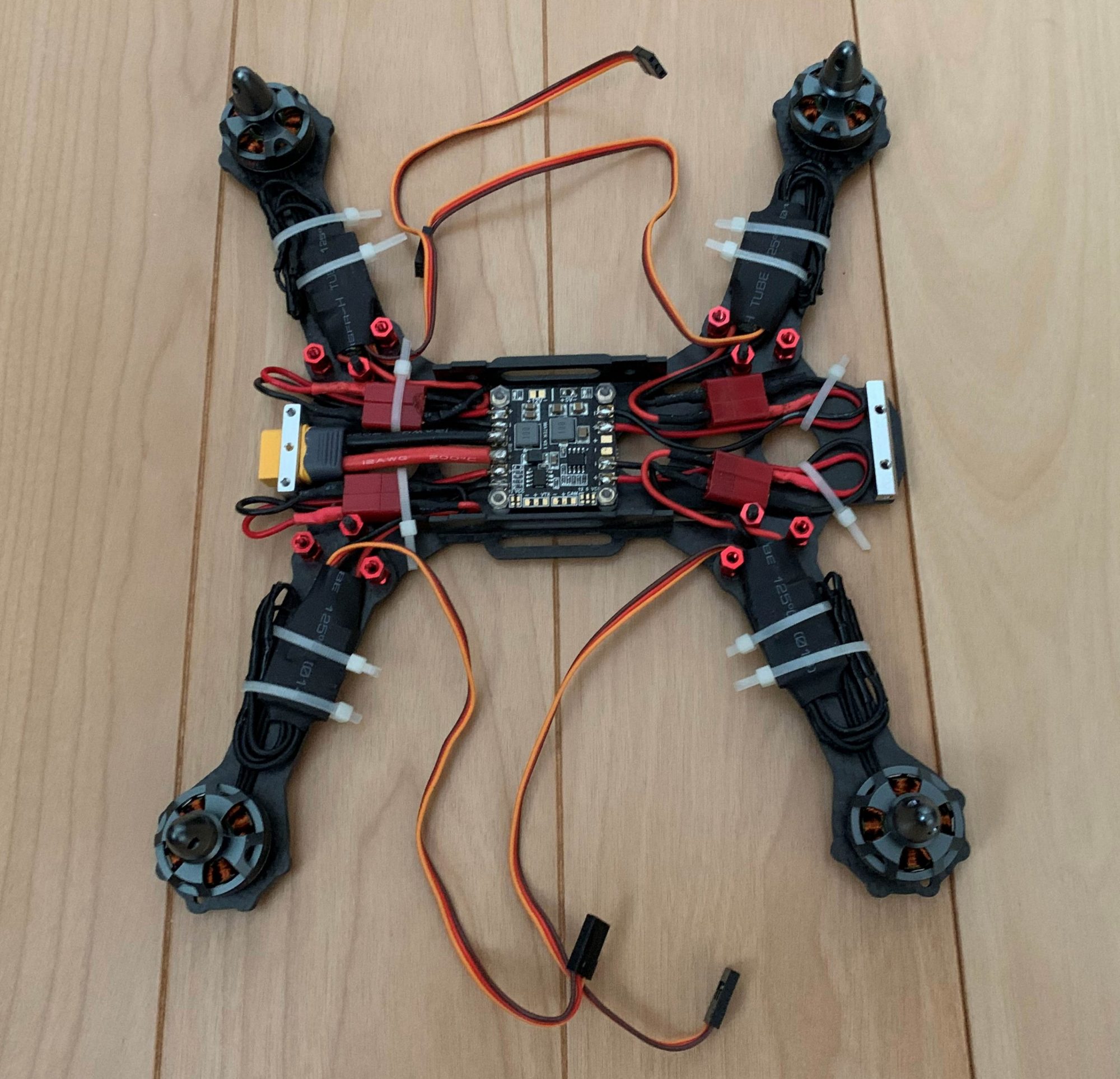
ベースフレームの組立はマニュアル図通りに行えば簡単。モーター、ESC、BECも取り付けは簡単だが、配線が太く、その取り回しには工夫が必要。BECとLiPoバッテリーをつなぐ線は極太(12AWG)で、BEC端子へのはんだ付けは難関。ESCの配線は、出っ張るとプロペラと干渉するので、インシュロックで固定。BECとESCを直接はんだ付けすれば簡単だったが、分解する時のためにTプラグで接続したので、更に配線を収納するのに手間取った。後で分かったことだが、この部分を分解することはなく、プラグでの接続は不要だった。
(部品仕様)
BEC:入力電圧範囲(2S-6S動作)7.2 – 26VDC、5V、12V出力、ESCへ4出力(20A)
ESC(Electroc Speed Controller):Simonk ESC 12A
ブラシレスDCモーター:LHI-MT2204Ⅱ,2300KV
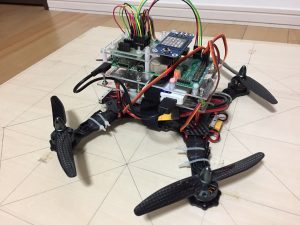
・FC(CC3D)と受信機の取り付け
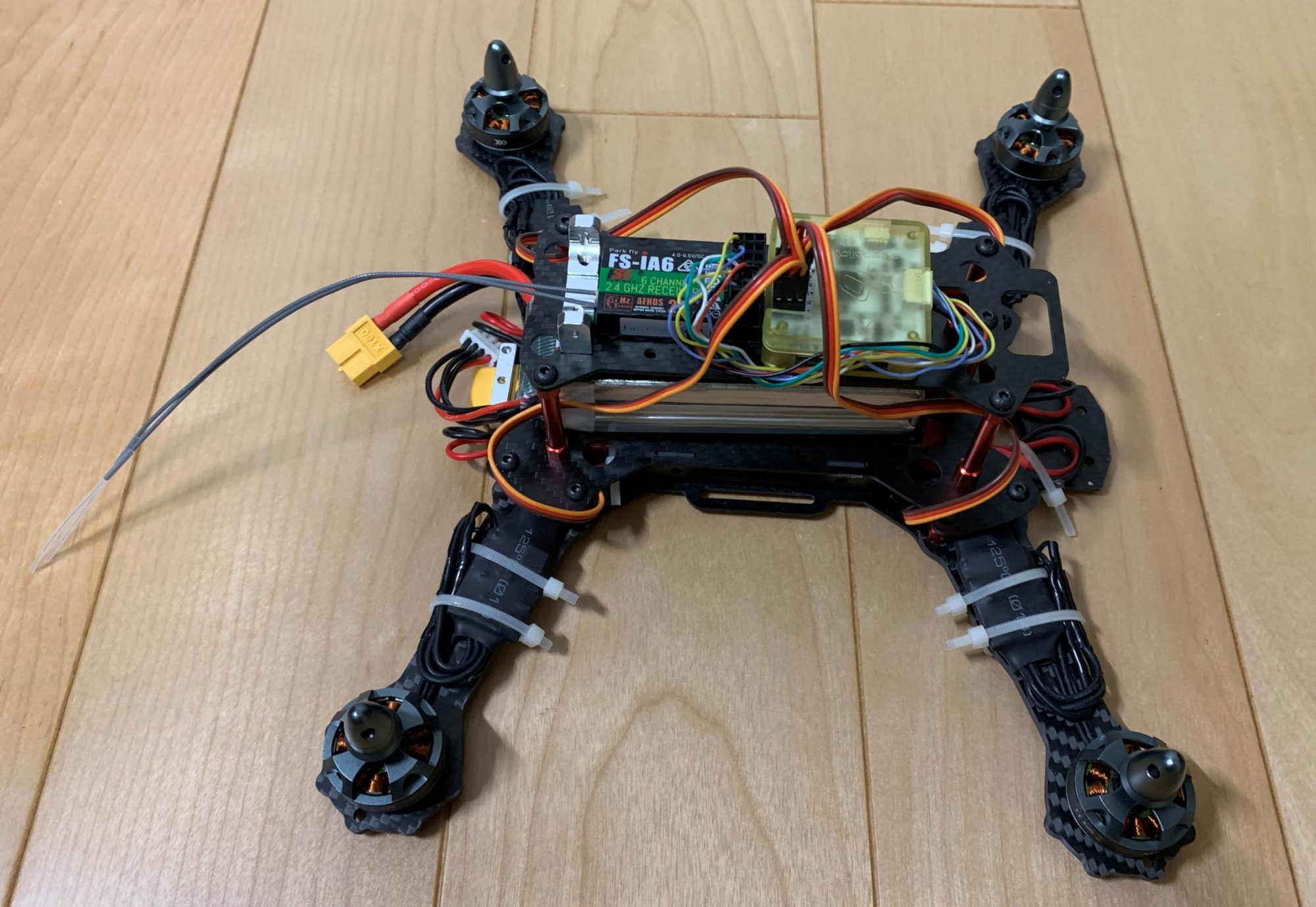
ベースフレームの2階にバッテリー、3階に、受信機とFlight Controller(FC)を組立
バッテリーは充電してから、マジックテープで固定。受信機とFCは両面テープで固定。FCと受信機の間の配線はマニュアルがないので、関連資料をWEBサイトで調べた。表記すると、次に様に意外と単純な配線。
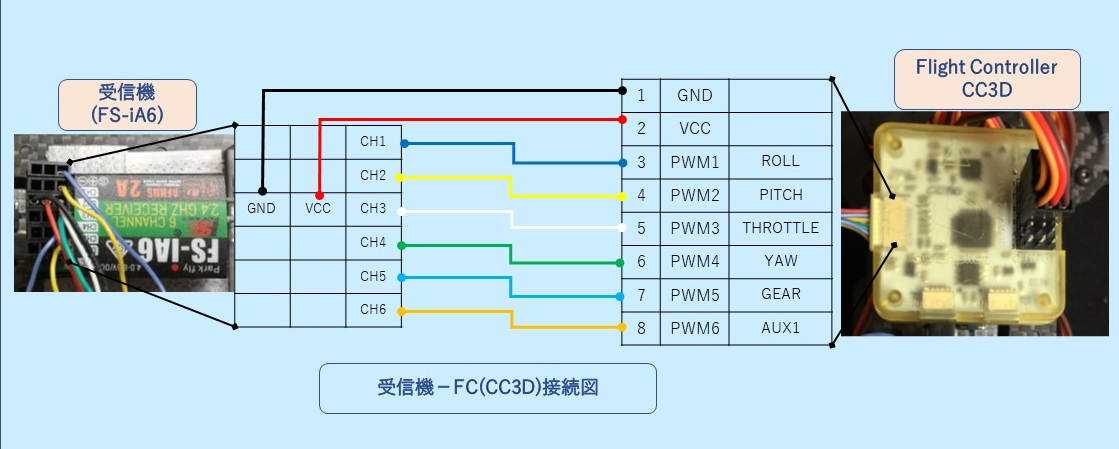

受信機:FS-iA6とFlight Controller:CC3D
バッテリー: HRB Li-Poバッテリー 11.1V 2200mAh 3S 30C
・プロペラとカバーの取り付け

プロペラの回転方向は、前①と後③が右回転、前②と後④が左回転。
・送受信機、ESC、FC(CC3D)の設定は意外と困難

送受信機セットはFlySky FS-i6 2.4G 6CH AFHDS プロポ 送信機・FS-iA6 Rx 受信機
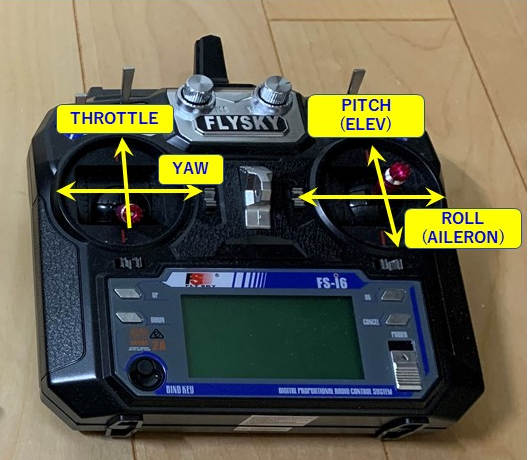
プロポ送信機のレバーは、左がスロットルとヨー、右がピッチとロール。左のレバーは、左に3秒以上倒すとモーター回転のロックを解除するディスアームドを兼ねている。ディスアームド後、しばらく放置するとアームド(ロック)となり、レバーを操作してもモーターが回転することはない。OpenPilotというソフトをダウンロードして、手順に従って、プロポ送受信機とESCの設定は完了する。手順の概要は、ESC初期化→スロットルレンジの設定→モーター最低起動速度の設定→送信機と受信機の設定(バインディング)。
・試験飛行はうまくいかなかった。
高回転のプロペラは脅威。家の中では凶器となるので、暴走しないようにワイヤーで結びつけ、墜落しても壊れないようにベッドの上で飛行試験をした。飛ぶことは飛ぶが、コントロールする前にワイヤーに引っ張られ墜落。その点トイドローンTELLOは小型で、プロペラの脅威もなく、家の中でも容易に飛行でき、コントロール可能。