初めてのRaspberry Pi
3年前、この書籍「最新Raspberry Piで学ぶ電子工作」(金丸隆志著)とRaspberry Pi 3Bを購入して、Raspberry Piのモノ作り、コト作りをスタートした。この書籍は、実例を入れて丁寧に分かりやすく書かれていて、Raspberry Piの初めの第一歩としてはとても良いと思う。今でもサポートページで最新情報を伝えてくれていて本当に親切な書籍だ。
以下に綴ったのは、Raspberry Piを使った最初の作品、ラズマウス1号機と2号機を製作した時を思い出して、残っている資料を纏めた記録です。
●最初に製作したラズマウス1号機の製作記録
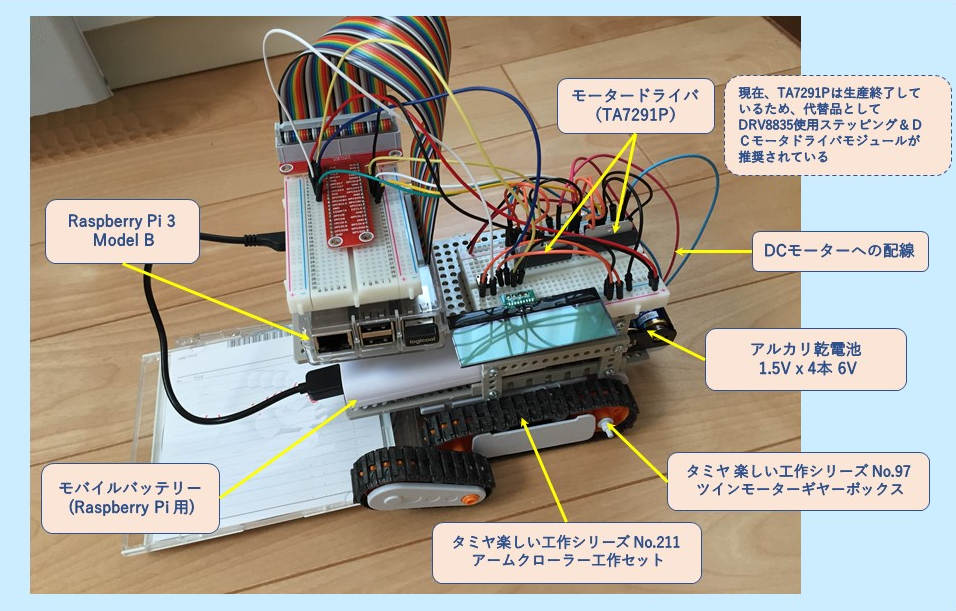
この書籍で紹介している「WebIOPiを用いたキャタピラ式模型」を製作。書籍の説明通りに製作。躯体部分は少し変えている。
●障害物で静止するラズマウス2号機の製作記録
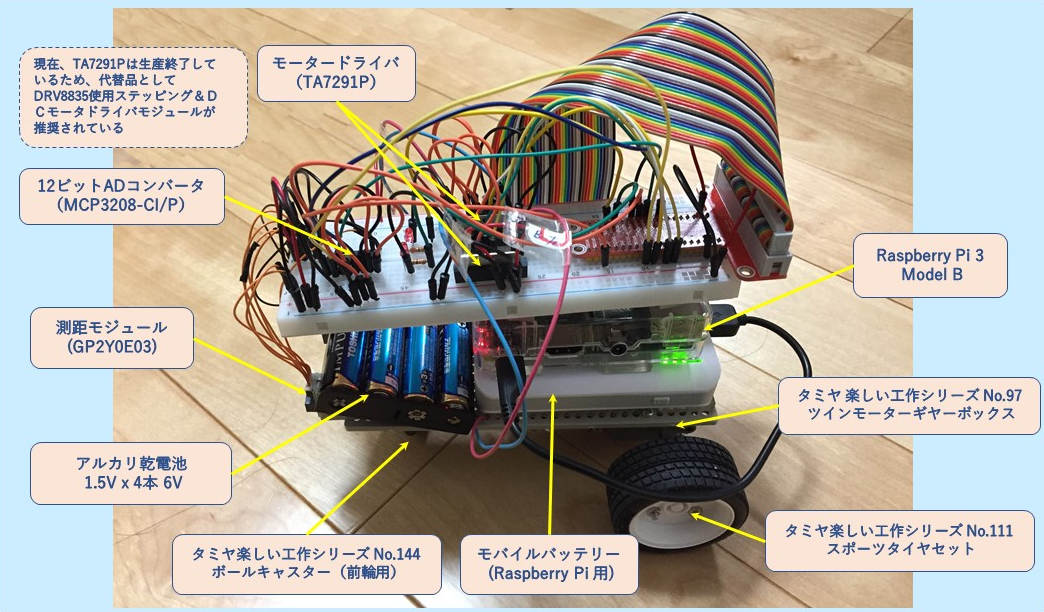
前輪をボールキャスター、後輪はφ56mmタイヤ(タミヤの楽しい工作シリーズ)を使って、自由回転が出来るようにし、測距センサーを使って、前方の障害物を検知して停止するようにした。測距センサーはI2Cとアナログ出力が可能だが、書籍の応用としてアナログ出力をADコンバーター(MCP3208)でRasPiに入力した。
・ラズマウスのプログラム構成
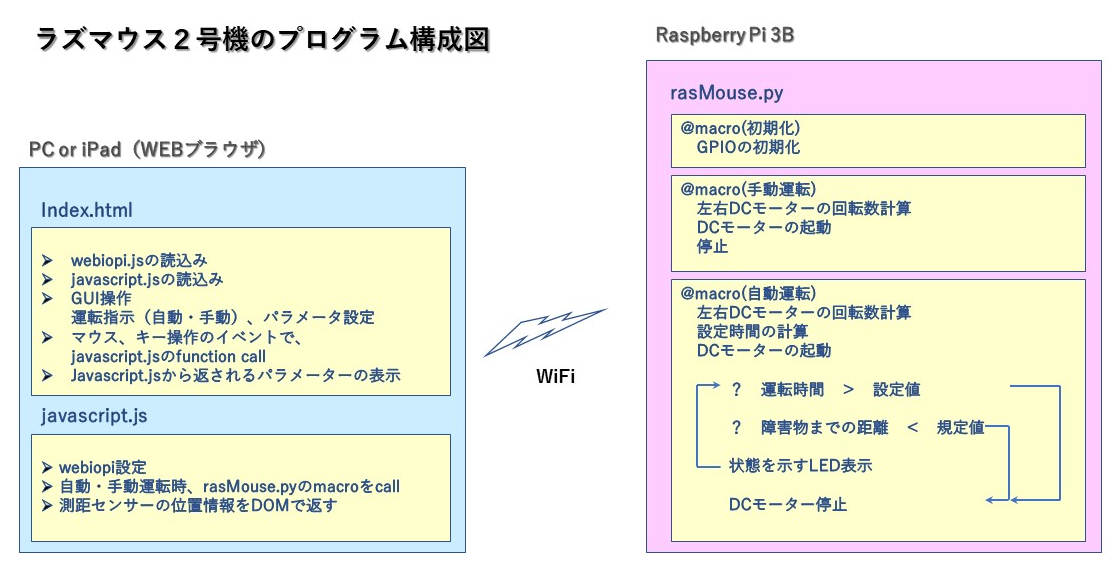
ラズマウス走行の操作はPCまたはiPadのWEBブラウザから行っている。WEBブラウザのindex.html、javascript.jsからwebiopiを用いて、rasMouse.pyの@macro関数を動かしている。自動運転モードでは、動く時間、速度をWEBで設定して、rasMouse.pyの@macro関数内で、DCモーターのDuty比を計算して起動し、一定時間経過後に停止するようにしている。
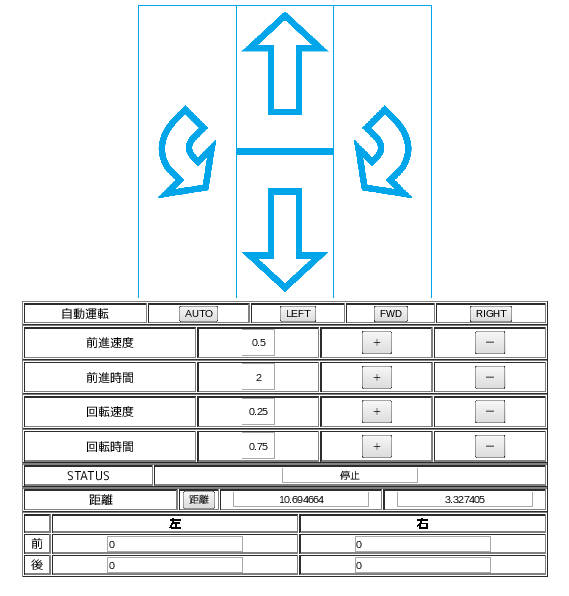
WEB操作パネルでは、手動運転の前後左右パネル(「最新Raspberry Piで学ぶ電子工作」と同じ)、自動運転モード(前進と左右移動)と、移動時間、移動速度の設定を行うことができる。RasPi側から送られる測距センサー(前方2個)の障害物までの距離を表示している。